Publications 2017
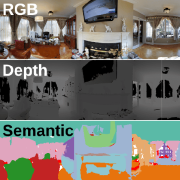
Matterport3D: Learning from RGB-D Data in Indoor Environments
3DV 2017
In this paper, we introduce Matterport3D, a large-scale RGB-D dataset containing 10,800 panoramic views from 194,400 RGB-D images of 90 building-scale scenes.
[paper] [bibtex] [project page]

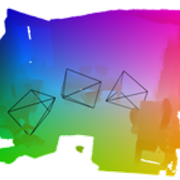
Multiframe Scene Flow with Piecewise Rigid Motion
3DV 2017
We introduce a novel multi-frame scene flow approach that jointly optimizes the consistency of the patch appearances and their local rigid motions from RGB-D image sequences.
[paper] [bibtex] [project page]

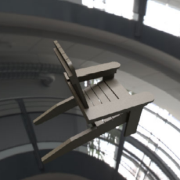
3DLite: Towards Commodity 3D Scanning for Content Creation
ACM Transactions on Graphics 2017 (TOG)
We present 3DLite, a novel approach to reconstruct 3D environments using consumer RGB-D sensors, making a step towards directly utilizing captured 3D content in graphics applications, such as video games, VR, or AR. Rather than reconstructing an accurate one-to-one representation of the real world, our method computes a lightweight, low-polygonal geometric abstraction of the scanned geometry.
[paper] [video] [bibtex] [supplemental] [project page]
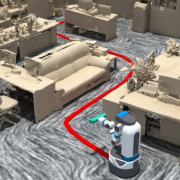
Autonomous Reconstruction of Unknown Indoor Scenes Guided by Time-varying Tensor Fields
ACM Transactions on Graphics 2017 (TOG)
We present a navigation-by-reconstruction approach to address this question where moving paths of the robot are planned to account for both global efficiency for fast exploration and local smoothness to obtain high-quality scans.
[paper] [video] [code] [bibtex] [project page]

Opt: A Domain Specific Language for Non-linear Least Squares Optimization in Graphics and Imaging
ACM Transactions on Graphics 2017 (TOG)
We propose a new language, Opt, in which a user simply writes energy functions over image- or graph-structured unknowns, and a compiler automatically generates state-of-the-art GPU optimization kernels.
[paper] [bibtex] [project page]

ACM Transactions on Graphics 2017 (TOG)
We introduce a novel, real-time, end-to-end 3D reconstruction framework, with a robust pose optimization strategy based on sparse feature matches and dense geometric and photometric alignment. One main contribution is the ability to update the reconstructed model on-the-fly as new (global) pose optimization results become available.
[paper] [video] [bibtex] [project page]

ICCV 2017
We introduce a novel method to obtain high-quality 3D reconstructions from consumer RGB-D sensors. Our core idea is to simultaneously optimize for geometry encoded in a signed distance field (SDF), textures from automaticallyselected keyframes, and their camera poses along with material and scene lighting.
[paper] [bibtex] [project page]
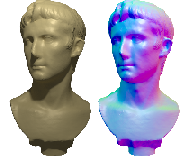
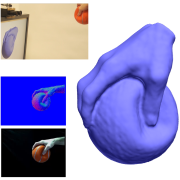
A Lightweight Approach for On-the-Fly Reflectance Estimation
ICCV 2017 (Oral)
We propose a lightweight, learning-based approach for surface reflectance estimation directly from 8-bit RGB images in real-time, which can be easily plugged into any 3D scanning-and-fusion system with a commodity RGBD sensor.
[paper] [bibtex] [project page]

ScanNet: Richly-annotated 3D Reconstructions of Indoor Scenes
CVPR 2017 (Spotlight)
We introduce ScanNet, an RGB-D video dataset containing 2.5M views in 1513 scenes annotated with 3D camera poses, surface reconstructions, and semantic segmentations.
[paper] [video] [bibtex] [project page]

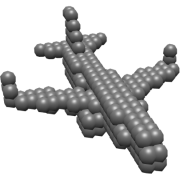
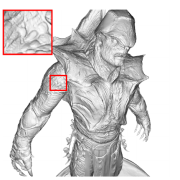
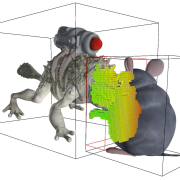
Shape Completion using 3D-Encoder-Predictor CNNs and Shape Synthesis
CVPR 2017 (Spotlight)
We introduce a data-driven approach to complete partial 3D shapes through a combination of volumetric deep neural networks and 3D shape synthesis. From a partially-scanned input shape, our method first infers a low-resolution - but complete - output.
[paper] [bibtex] [project page]

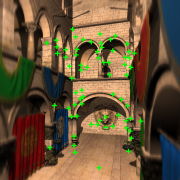
3DMatch: Learning the Matching of Local 3D Geometry in Range Scans
CVPR 2017 (Oral)
In this paper, we introduce 3DMatch, a data-driven local feature learner that jointly learns a geometric feature representation and an associated metric function from a large collection of real-world scanning data.
[paper] [video] [bibtex] [project page]Publications 2016

Learning to Navigate the Energy Landscape
3DV 2016
In this paper, we present a novel, general, and efficient architecture for addressing computer vision problems that are approached from an `Analysis by Synthesis' standpoint.
[paper] [video] [bibtex] [project page]

VolumeDeform: Real-time Volumetric Non-rigid Reconstruction
ECCV 2016
We present a novel approach for the reconstruction of dynamic geometric shapes using a single hand-held consumer-grade RGB-D sensor at real-time rates. Our method does not require a pre-defined shape template to start with and builds up the scene model from scratch during the scanning process.
[paper] [video] [bibtex] [supplemental] [project page]

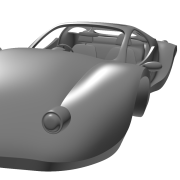
Efficient GPU Rendering of Subdivision Surfaces using Adaptive Quadtrees
ACM Transactions on Graphics 2016 (TOG)
We present a novel method for real-time rendering of subdivision surfaces whose goal is to make subdivision faces as easy to render as triangles, points, or lines. Our approach uses the GPU tessellation hardware and processes each face of a base mesh independently and in a streaming fashion, thus allowing an entire model to be rendered in a single pass.
[paper] [video] [bibtex] [project page]

PiGraphs: Learning Interaction Snapshots from Observations
ACM Transactions on Graphics 2016 (TOG)
We learn a probabilistic model connecting human poses and arrangements of objects from observations of interactions collected with commodity RGB-D sensors. This model is encoded as a set of Prototypical Interaction Graphs (PiGraphs): a human-centric representation capturing physical contact and attention linkages between geometry and the human body.
[paper] [video] [bibtex] [project page]

ProxImaL: Efficient Image Optimization using Proximal Algorithms
ACM Transactions on Graphics 2016 (TOG)
ProxImaL is a domain-specific language and compiler for image optimization problems that makes it easy to experiment with different problem formulations and algorithm choices. The compiler intelligently chooses the best way to translate a problem formulation and choice of optimization algorithm into an efficient solver implementation.
[paper] [bibtex] [supplemental] [project page]

Face2Face: Real-time Face Capture and Reenactment of RGB Videos
CVPR 2016 (Oral)
We present a novel approach for real-time facial reenactment of a monocular target video sequence (e.g., Youtube video). The source sequence is also a monocular video stream, captured live with a commodity webcam. Our goal is to animate the facial expressions of the target video by a source actor and re-render the manipulated output video in a photo-realistic fashion.
[paper] [video] [bibtex] [supplemental] [project page]
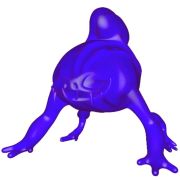
Volumetric and Multi-View CNNs for Object Classification on 3D Data
CVPR 2016 (Spotlight)
In this paper, we improve both Volumetric CNNs and Multi-view CNNs by introducing new distinct network architectures. Overall, we are able to outperform current state-of-the-art methods for both Volumetric CNNs and Multi-view CNNs.
[paper] [code] [bibtex] [supplemental] [project page]Publications 2015

Real-time Expression Transfer for Facial Reenactment
ACM Transactions on Graphics 2015 (TOG)
We present a method for the real-time transfer of facial expressions from an actor in a source video to an actor in a target video, thus enabling the ad-hoc control of the facial expressions of the target actor.
[paper] [video] [bibtex] [project page]

Activity-centric Scene Synthesis for Functional 3D Scene Modeling
ACM Transactions on Graphics 2015 (TOG)
We present a novel method to generate 3D scenes that allow the same activities as real environments captured through noisy and incomplete 3D scans.
[paper] [video] [bibtex] [supplemental] [project page]

SemanticPaint: Interactive 3D Labeling and Learning at your Fingertips
ACM Transactions on Graphics 2015 (TOG)
We present a new interactive and online approach to 3D scene understanding. Our system, SemanticPaint, allows users to simultaneously scan their environment, while interactively segmenting the scene simply by reaching out and touching any desired object or surface.
[paper] [video] [bibtex] [project page]
Efficient Ray Tracing of Subdivision Surfaces using Tessellation Caching
High Performance Graphics 2015
In this paper, we propose method to efficiently ray trace subdivision surfaces using a lazy-build caching scheme while exploiting the capabilities of today's many-core architectures. Our approach is part of Intel's Embree.
[paper] [video] [code] [bibtex] [project page]

Real-time Rendering Techniques with Hardware Tessellation
Computer Graphics Forum 2015
In this survey, we provide an overview of real-time rendering techniques with hardware tessellation by summarizing, discussing, and comparing state-of-the art approaches.
[paper] [bibtex] [project page]
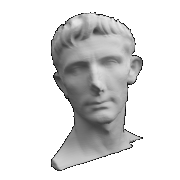
Shading-based Refinement on Volumetric Signed Distance Functions
ACM Transactions on Graphics 2015 (TOG)
We present a novel method to obtain fine-scale detail in 3D reconstructions generated with low-budget RGB-D cameras or other commodity scanning devices.
[paper] [video] [bibtex] [project page]
Exploiting Uncertainty in Regression Forests for Accurate Camera Relocalization
CVPR 2015
In this paper, we train a regression forest to predict mixtures of anisotropic 3D Gaussians and show how the predicted uncertainties can be taken into account for continuous pose optimization. Experiments show that our method is able to relocalize up to 40 percent more frames than the state of the art.
[paper] [video] [bibtex] [project page]
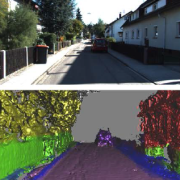
Incremental Dense Semantic Stereo Fusion for Large-Scale Semantic Scene Reconstruction
ICRA 2015
In this paper, we build on a recent hash-based technique for large-scale fusion and an efficient mean-field inference algorithm for densely-connected CRFs to present what to our knowledge is the first system that can perform dense, large-scale, outdoor semantic reconstruction of a scene in (near) real time.
[paper] [video] [bibtex] [project page]
The Semantic Paintbrush: Interactive 3D Mapping and Recognition in Large Outdoor Spaces
CHI 2015
We present an augmented reality system for large scale 3D reconstruction and recognition in outdoor scenes. Unlike existing prior work, which tries to reconstruct scenes using active depth cameras, we use a purely passive stereo setup, allowing for outdoor use and extended sensing range.
[paper] [bibtex] [project page]
Database-Assisted Object Retrieval for Real-Time 3D Reconstruction
Eurographics 2015
We present a novel reconstruction approach based on retrieving objects from a 3D shape database while scanning an environment in real-time. With this approach, we are able to replace scanned RGB-D data with complete, hand-modeled objects from shape databases.
[paper] [video] [bibtex] [project page]
Dynamic Feature-Adaptive Subdivision
I3D 2015
In this paper, we present dynamic feature-adaptive subdivision (DFAS), which improves upon FAS by enabling an independent subdivision depth for every irregularity.
[paper] [video] [bibtex] [project page]Publications 2014

SceneGrok: Inferring Action Maps in 3D Environments
ACM Transactions on Graphics 2014 (TOG)
In this paper, we present a method to establish a correlation between the geometry and the functionality of 3D environments.
[paper] [video] [bibtex] [project page]
Real-time Shading-based Refinement for Consumer Depth Cameras
ACM Transactions on Graphics 2014 (TOG)
We present the first real-time method for refinement of depth data using shape-from-shading in general uncontrolled scenes.
[paper] [video] [code] [bibtex] [project page]
Real-time Non-rigid Reconstruction using an RGB-D Camera
ACM Transactions on Graphics 2014 (TOG)
We present a combined hardware and software solution for markerless reconstruction of non-rigidly deforming physical objects with arbitrary shape in real-time.
[paper] [video] [bibtex] [project page]
Real-Time Deformation of Subdivision Surfaces from Object Collisions
High Performance Graphics 2014
We present a novel real-time approach for fine-scale surface deformations resulting from collisions.
[paper] [video] [bibtex] [project page]

Local Painting and Deformation of Meshes on the GPU
Computer Graphics Forum 2014
We present a novel method to adaptively apply modifications to scene data stored in GPU memory. Such modifications
[paper] [video] [bibtex] [project page]

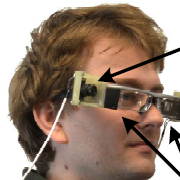
RetroDepth: 3D Silhouette Sensing for High-Precision Input On and Above Physical Surfaces
CHI 2014
We present RetroDepth, a new vision-based system for accurately sensing the 3D silhouettes of hands, styluses, and other objects, as they interact on and above physical surfaces.
[video] [bibtex] [project page]
State of the Art Report on Real-time Rendering with Hardware Tessellation
Eurographics 2014
In this state of the art report, we provide an overview of recent work and challenges in this topic by summarizing, discussing and comparing methods for the rendering of smooth and highly detailed surfaces in real-time.
[paper] [bibtex] [project page]

Combining Inertial Navigation and ICP for Real-time 3D Surface Reconstruction
Eurographics 2014
We present a novel method to improve the robustness of real-time 3D surface reconstruction by incorporating inertial sensor data when determining inter-frame alignment. With commodity inertial sensors, we can significantly reduce the number of iterative closest point (ICP) iterations required per frame.
[paper] [video] [bibtex] [project page]Publications 2013

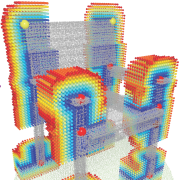
Real-time 3D Reconstruction at Scale using Voxel Hashing
ACM Transactions on Graphics 2013 (TOG)
Online 3D reconstruction is gaining newfound interest due to the availability of real-time consumer depth cameras. We contribute an online system for large and fine scale volumetric reconstruction based on a memory and speed efficient data structure.
[paper] [video] [code] [bibtex] [supplemental] [project page]
Analytic Displacement Mapping using Hardware Tessellation
ACM Transactions on Graphics 2013 (TOG)
Displacement mapping is ideal for modern GPUs since it enables high-frequency geometric surface detail on models with low memory I/O. We provide a comprehensive solution to these problems by introducing a smooth analytic displacement function.
[paper] [video] [bibtex] [project page]
Real-time Collision Detection for Dynamic Hardware Tessellated Objects
Eurographics 2013
We present a novel method for real-time collision detection of patch based, displacement mapped objects using hardware tessellation. Our method supports fully animated, dynamically tessellated objects and runs entirely on the GPU.
[paper] [video] [bibtex] [project page]

Rendering Subdivision Surfaces using Hardware Tessellation
PhD Thesis (Published by Dr. Hut)
In this thesis we present techniques that facilitate the use of high-quality movie content in real-time applications that run on commodity desktop computers. We utilize modern graphics hardware and use hardware tessellation to generate surface geometry on-the-fly based on patches.
[paper] [bibtex] [project page]
Real-time Simulation of Human Vision using Temporal Compositing with CUDA on the GPU
Proceedings 25th Workshop on Parallel Systems and Algorithms 2013
We present a novel approach that simulates human vision including visual defects such as glaucoma by temporal composition of human vision in real-time on the GPU. Therefore, we determine eye focus points every time step and adapt the lens accommodation of our virtual eye model accordingly.
[paper] [bibtex] [project page]Publications 2012

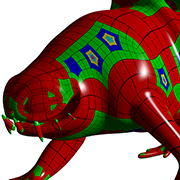
Feature Adaptive GPU Rendering of Catmull-Clark Subdivision Surfaces
ACM Transactions on Graphics 2012 (TOG)
We present a novel method for high-performance GPU based rendering of Catmull-Clark subdivision surfaces. Unlike previous methods, our algorithm computes the true limit surface up to machine precision, and is capable of rendering surfaces that conform to the full RenderMan specification for Catmull-Clark surfaces.
[paper] [video] [code] [bibtex] [project page]

Patch-based Occlusion Culling for Hardware Tessellation
Computer Graphics International 2012
We present an occlusion culling algorithm that leverages the unique characteristics of patch primitives within the hardware tessellation pipeline.
[paper] [video] [bibtex] [project page]
Efficient Evaluation of Semi-Smooth Creases in Catmull-Clark Subdivision Surfaces
Eurographics 2012
We present a novel method to evaluate semi-smooth creases in Catmull-Clark subdivision surfaces. Our algorithm supports both integer and fractional crease tags corresponding to the RenderMan (Pixar) specification.
[paper] [video] [bibtex] [project page]

Real-time Simulation and Visualization of Human Vision through Eyeglasses on the GPU
ACM SIGGRAPH VRCAI 2012
We present a novel approach that allows real-time simulation of human vision through eyeglasses. Our system supports glasses that are composed of a combination of spheric, toric and in particular of free-form surfaces.
[paper] [bibtex] [project page]Publications 2011
Effective Back-Patch Culling for Hardware Tessellation
Proceedings of Vision, Modeling, and Visualization 2011
When rendering objects with hardware tessellation, back-facing patches should be culled as early as possible to avoid unnecessary surface evaluations, and setup costs for the tessellator and rasterizer.
[paper] [video] [bibtex] [project page]Publications 2010

Fast Indirect Illumination Using Layered Depth Images
Computer Graphics International 2010
We present a novel hybrid rendering method for diffuse and glossy indirect illumination.
[paper] [video] [bibtex] [project page]