Ph.D. (Computer Science), Stanford University, 2006
B.Math (Computer Science & Pure Mathematics), University of Waterloo, 2001
|
|
<firstname> DOT <lastname> AT gmail.com |
| LinkedIn Profile |
|
|
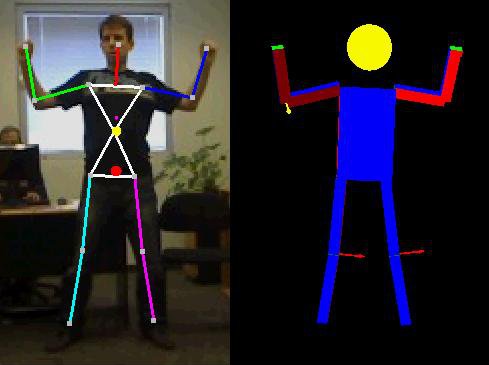
From 2007 until 2014 I worked at PrimeSense as a computer vision researcher. PrimeSense was acquired by Apple at the end of 2013. PrimeSense developed depth sensors and computer vision middleware to enable natural interaction with computers and other devices. Our technology was used in the original XBox Kinect, as well as many other projects requiring 3D capabilities (such as 3D scanning) and gesture interaction. During my time at PrimeSense/Apple, I developed a number of depth-based tracking and gesture detection algorithms, including 3D full body tracking. See below for examples of some of this work. |
|
|
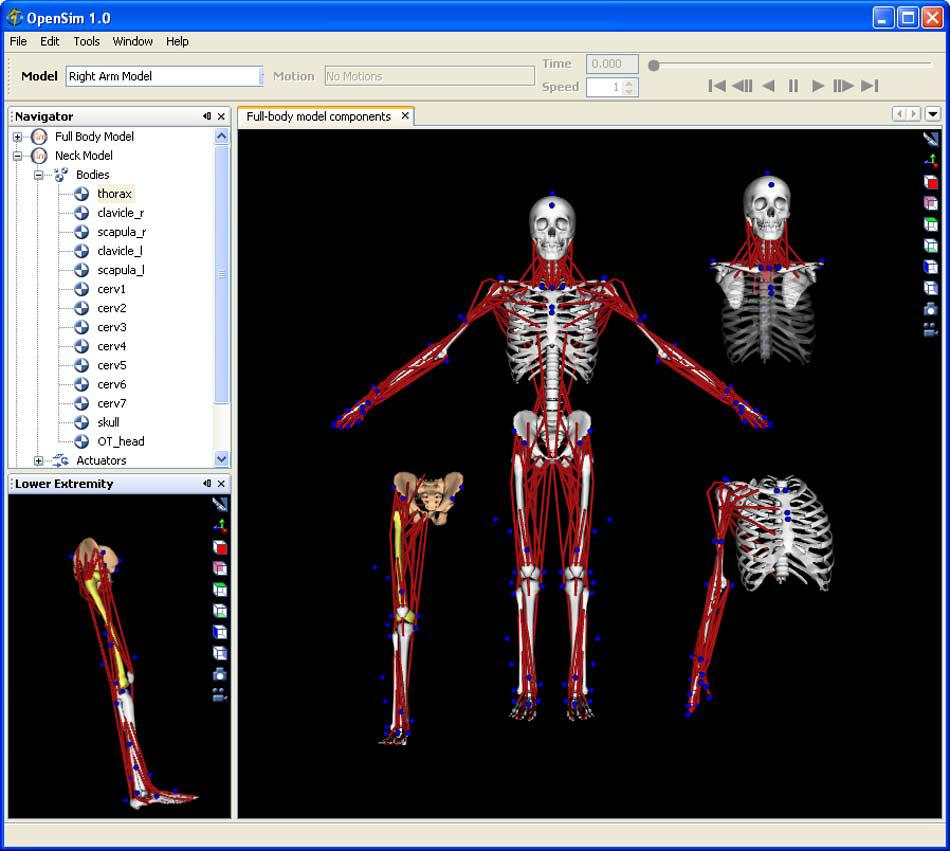
From 2006 to 2007 I was a distinguished postdoctoral fellow in the Simbios Center at Stanford University. There I contributed to the development of OpenSim, software for simulation and analysis of musculoskeletal models. |
|
|
I received my Ph.D. from the Computer Science department at Stanford University in 2006. My advisor was Ron Fedkiw, and my dissertation was on physically-based simulation of solids and solid-fluid coupling. |
|
|
I received a Bachelor of Mathematics in Computer Science and Pure Math from the University of Waterloo in 2001. Through Waterloo's co-op program, I got a chance to work at some interesting places as a part of my degree. |
|
Computer Vision at PrimeSense See these videos for examples of some of the work I was been involved with while at PrimeSense. Some of these algorithms were available as part of the PrimeSense NiTE middleware (no longer online officially, but seems to be archived here). |
|
OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement IEEE Transactions on Biomedical Engineering. 54(11), pp. 1940-1950, 2007. [paper] [sample OpenSim usage] |

|
Physically Based Simulation of Solids and Solid-Fluid Coupling Ph.D. Thesis, Stanford University, 2006 [paper] |
|
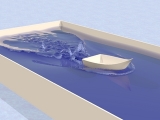
Efficient Simulation of Large Bodies of Water by Coupling Two and Three Dimensional Techniques
ACM Transactions on Graphics. 25(3), pp. 805-811, 2006. (SIGGRAPH 2006) [paper] [video] |

|
Impulse-Based PD Control for Joints and Muscles
SIGGRAPH 2006 Sketch [paper] [video] |
|
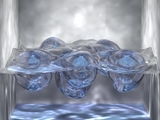
Melting and Burning Solids into Liquids and Gases
IEEE TVCG 12(3), pp. 343-352, 2006. [paper] [video] |
|
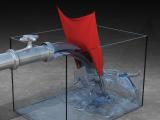
Coupling Water and Smoke to Thin Deformable and Rigid Shells
ACM Transactions on Graphics. 24(3), pp. 973-981, 2005. (SIGGRAPH 2005) [project] [paper] [slides] [video] |
|
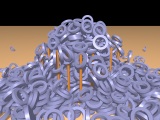
Nonconvex Rigid Bodies with Stacking
ACM Transactions on Graphics. 22(3), pp. 871-878, 2003. (SIGGRAPH 2003) [project] [paper] [slides] [video] |